Difference between revisions of "File:FoldamerPrinterConcept.png"
From apm
(Author: Eric Drexler <br> Source: https://www.energy.gov/sites/prod/files/2016/06/f33/Keynote%20presentation%20-%20Drexler.pdf <br> ----- Page 20: <br> = A rigid mechanical configuration = == Structural configuration: == • Box-like structure, good...) |
(→A rigid mechanical configuration: fixed bullet points) |
||
| Line 7: | Line 7: | ||
== Structural configuration: == | == Structural configuration: == | ||
| − | + | ||
| − | + | * Box-like structure, good rigidity | |
| − | + | * Bending compliance primarily on the z axis | |
| − | + | * Low z axis stiffness is acceptable | |
| + | * '''Result:''' tolerates low-modulus materials | ||
== Stepper motor configuration: == | == Stepper motor configuration: == | ||
| − | + | ||
| − | + | * Configuration allows large actuator arrays | |
| − | + | * Large arrays enable stiff motor interfaces | |
| + | * Large arrays tolerate stochastic actuators | ||
== Motion and clearances: == | == Motion and clearances: == | ||
| − | + | ||
| − | + | * Workspace comparable to device width | |
| + | * Open z-axis position allows product exit | ||
Nominal scale: ~50–100 nm | Nominal scale: ~50–100 nm | ||
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Latest revision as of 16:29, 14 April 2021
Author: Eric Drexler
Source: https://www.energy.gov/sites/prod/files/2016/06/f33/Keynote%20presentation%20-%20Drexler.pdf
Page 20:
Contents
A rigid mechanical configuration
Structural configuration:
- Box-like structure, good rigidity
- Bending compliance primarily on the z axis
- Low z axis stiffness is acceptable
- Result: tolerates low-modulus materials
Stepper motor configuration:
- Configuration allows large actuator arrays
- Large arrays enable stiff motor interfaces
- Large arrays tolerate stochastic actuators
Motion and clearances:
- Workspace comparable to device width
- Open z-axis position allows product exit
Nominal scale: ~50–100 nm
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 16:27, 14 April 2021 | 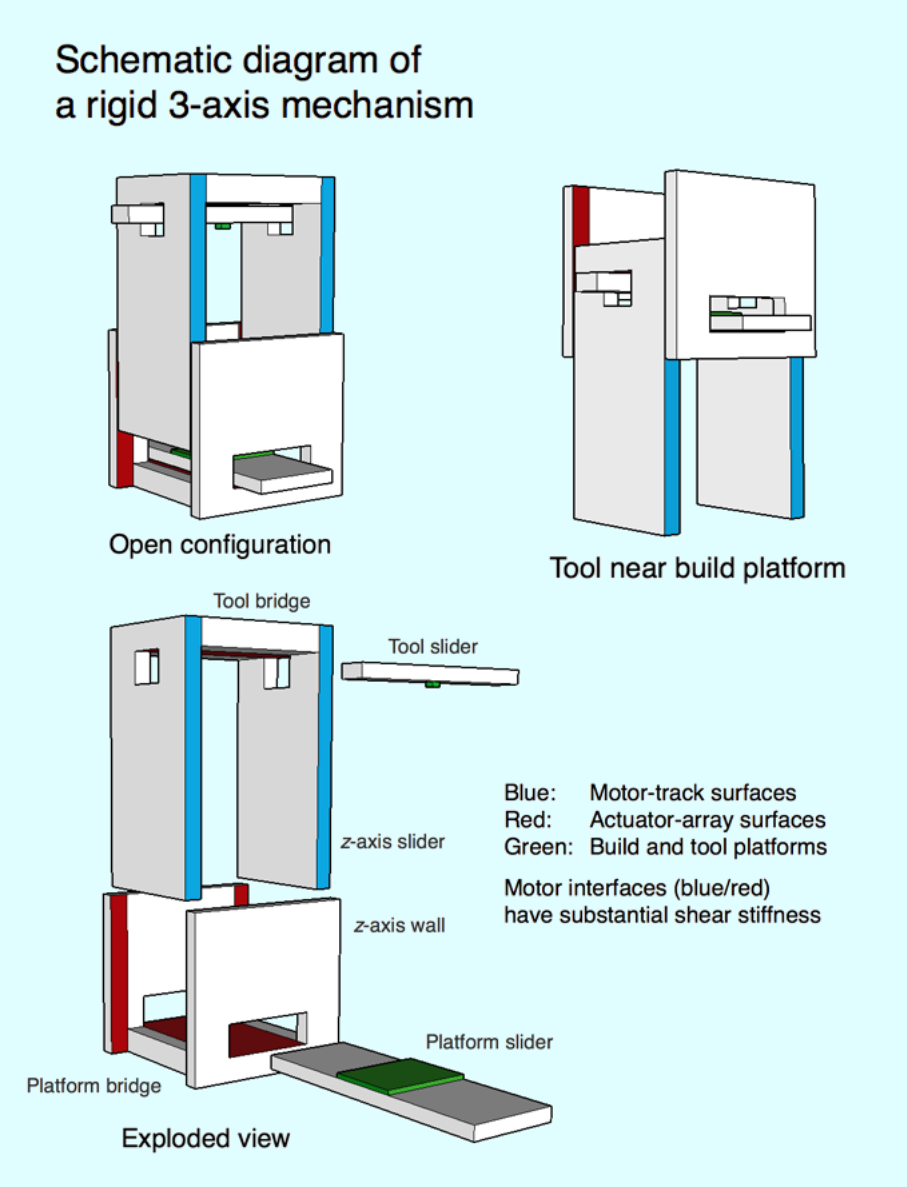 | 907 × 1,187 (221 KB) | Apm (Talk | contribs) | Author: Eric Drexler <br> Source: https://www.energy.gov/sites/prod/files/2016/06/f33/Keynote%20presentation%20-%20Drexler.pdf <br> ----- Page 20: <br> = A rigid mechanical configuration = == Structural configuration: == • Box-like structure, good... |
- You cannot overwrite this file.
File usage
The following 2 pages link to this file:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}